Znanstvenici na sveučilištu Birmingham razvili su robota koji prepoznaje oblik posuđa i stavlja ga na odgovarajuće mjesto. Moći će ga se naučiti i druge stvari
RAZMAZIT ĆE NAS
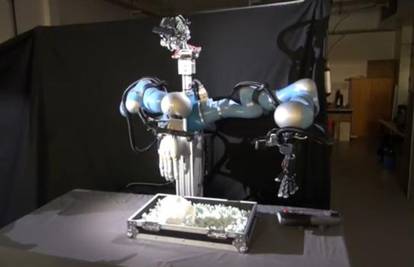
Suđematik: Boris puni perilicu posuđa, a vrijedi 3,5 mil. kuna







Nama se možda čini jednostavno, ali robotima je punjenje perilice vrlo težak zadatak. Ako smo ga to naučili, moći ćemo ga naučiti svašta. A to je super, rekao je profesor Jeremy Wyatt sa sveučilišta u Birminghamu .
On je s kolegama
razvio naprednog robota Borisa
, koji
pomoću senzora
i
tri računala
koja njime upravljaju može prepoznati o kojem je komadu posuđa riječ i staviti ga na pravo mjesto u perilicu.
Na glavi ima četiri kamere
koje mu pomažu pri odmjeravanju predmeta i mjerenju udaljenosti.
Svaka ruka ima tri kružna zgloba
koji mu jamče maksimalnu fleksibilnost, a
svaka šaka pet prstiju koje pokreće 20 malih motora
.
VIDEO
- U sekundi razmotri 100 potencijalnih načina kako da uhvati predmet i svaki put odabere pravi. Njegove su mogućnosti u drugim aktivnostima goleme - rekao je Wyatt i dodao da su
potrošili 3,5 milijuna kuna
kako bi izradili robota.
Sveučilište u Birminghamu
još nije objavilo namjerava li
Borisa
masovno proizvoditi, no nema sumnje da bi dobro došao svakom kućanstvu. Pa tko će svaki put sklanjati posuđe sa stola i nositi ga u perilicu? Taman posla da i to moramo raditi.
"Za pet, deset godina roboti će biti naša svakodnevica"
Moramo ga još usavršiti da bi mogao prebacivati predmete iz jedne ruke u drugu, ali to je pitanje vremena. Za deset godina roboti će živjeti s nama, kaže profesor Wyatt.
PRSTI - Ima pet prstiju baš kao i mi, a njima upravlja 20 motora. Svaki prst ima senzor koji mu javlja koliko pritišće predmet.
RUKE - Izrađene su od lake legure aluminija i svaka može podići 16 kilograma tereta.
GLAVA - Boris ima pet kamera. Dvije širokokutne da vidi što uzima u ruku, dvije HD kamere za bolje detalje i jednu kojom mjeri dubinu prostora.
MOZAK - Robotom upravljaju tri računala. Dva za kontroliraju kretanja i rad ruku te nisu na tijelu. Treće računalo je na njemu i upravlja senzorima i kamerama.
ZAPEŠĆA - Koristi kamere za dubinu prostora kako bi napravio sitne pomake dok se približava predmetu.
ZGLOBOVI - Svaka ruka ima tri kružna zgloba za maksimalnu fleksibilnost.
Sve što je bitno, na dohvat ruke
Skini aplikaciju za najbolje iskustvo portala. Čitaj, komentiraj i budi uvijek u toku s najnovijim vijestima.


Odaberi temu koju želiš pratiti
Primaj sve nove vijesti o temi i budi u tijeku